|
Ashutosh Gupta I am pursuing my M.S. in Robotics with a minor in Artificial intelligence (AI) at the Collaborative Robotics and Intelligent Systems Institute (CoRIS), Oregon State University. I am advised by Dr. Alan Fern and am currently exploring Learning-based control for complex-legged systems such as Bipeds, Humanoids, and Quadrupeds. I have hands-on expertise in reinforcement learning, sim-to-real transfer, multi-agent systems, and whole-body control for robots. I completed my BE in Electronics and Communication from BITS Pilani, Goa campus in 2023. For my undergraduate thesis, I worked at Biorobotics lab, CMU with Dr. Howie Choset. My notable work there included developing a 3D surface reconstruction module for a robotic ultrasound system and working on modular snake robot locomotion. Email / Resume / LinkedIn / Github / Google Scholar |

|
Research InterestsLearning-based robot controls, Vision for locomotion, Reinforcement Learning, 3D Perception |
Updates
|
|
Multi-Biped Control for Payload Transport
Bikram Pandit, Ashutosh Gupta, Mohitvishnu S. Gadde, Addison Johnson, Aayam Shrestha, Helei Duan, Jeremy Dao, Alan Fern CoRL, 2024 (Oral Presentation) Webpage | Paper | Publication | Poster | Video | Code Designed decentralized RL controllers for up to 100 Cassie bipeds to transport payloads, scaling without retraining and transferring to real robots. Extended to rough terrains (stairs, slopes, debris) with ~90% success, and compared against a transformer-based centralized policy. |
|
Reinforcement Learning for Quadruped Locomotion
Ashutosh Gupta, Alan Fern Trained RL policies in IsaacLab for robust quadruped locomotion, integrating rewards for gait regularization, body posture, and foot clearance. Achieved whole-body control and sim-to-real transfer on Unitree Go2 and Boston Dynamics Spot, with successful walking on varied terrains including slopes, stairs, and rough surfaces. |
|
Humanoid Reinforcement Learning Locomotion
Ashutosh Gupta, Alan Fern Developed RL policies for the Digit humanoid in MuJoCo and Isaac Sim, achieving high-speed running up to 3 m/s in simulation and ~1.8 m/s on hardware. Extended to blind terrain locomotion with feet-airtime rewards, enabling stable walking on slopes and uneven surfaces without explicit terrain input. |
|
Language-Conditioned Quadruped Locomotion using LLMs
Mohitvishnu S. Gadde, Ashutosh Gupta, Hojjat Goudarzi Presentation | Paper | Video | Code Built a hierarchical RL control pipeline where an LLM generated delta-pose commands were translated into locomotion behaviors in Isaac sim. Demonstrated natural-language control of a Unitree Go2, enabling commands like “walk forward quickly” to be executed as interpretable motion goals. |
|
Multi-Agent RL for Scalable Payload Transport
Ashutosh Gupta, Jeremiah Goddard, Mohitvishnu S. Gadde Slides | Paper Multi-agent RL for payload transport problem in the VMAS simulator to study decentralized cooperation under sensing, communication, and resource constraints. Designed reward functions for stable policy learning with Independent PPO, achieving emergent cooperation and zero-shot scalability from 2 to 50 agents. |
|
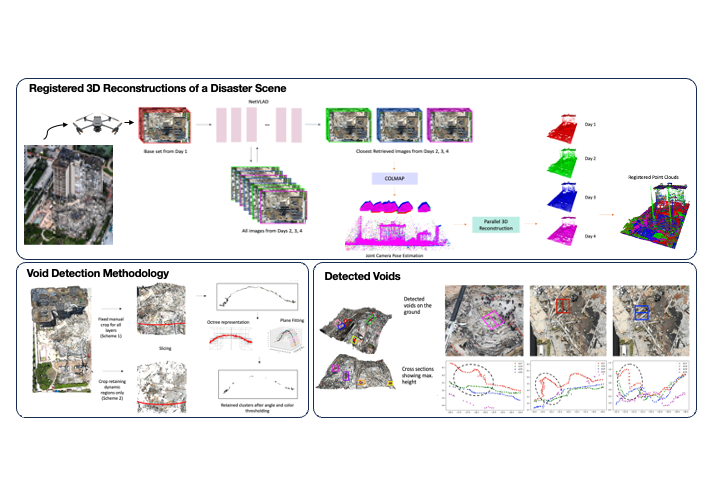
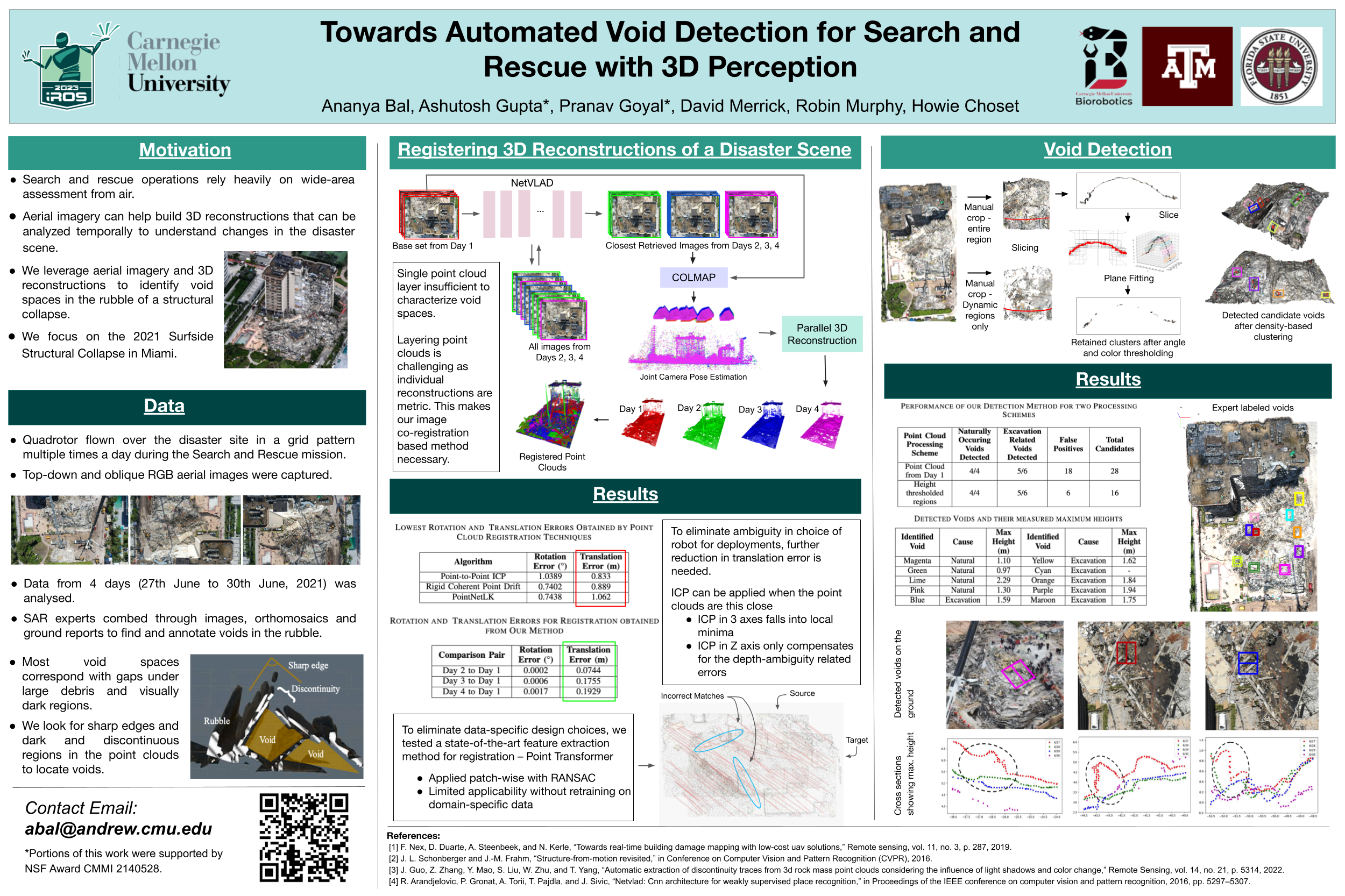
Void Detection with 3D Perception
Ananya Bal, Ashutosh Gupta, Pranav Goyal, David Merrick, Robin Murphy, Howie Choset IROS, 2023 (Oral Presentation) Paper | Publication | Poster | Video Developed a 3D perception pipeline using Open3D and COLMAP SfM to reconstruct and register rubble scenes from drone imagery. Achieved 82% reduction in registration error and detected 11/12 expert-labeled voids in Surfside collapse data, supporting search-and-rescue missions. |
|
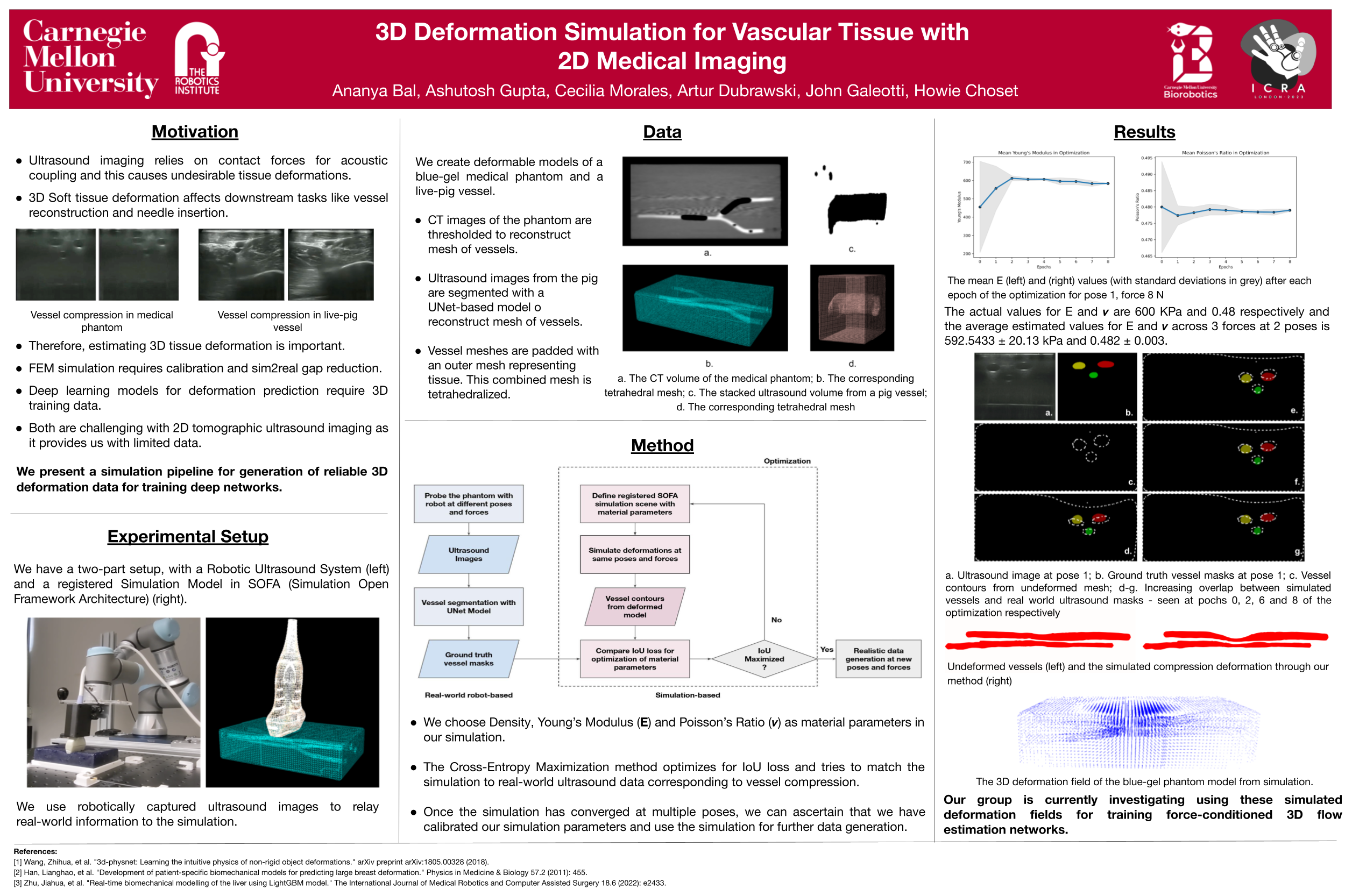
Deformable Object Simulation using FEM
Ananya Bal, Ashutosh Gupta, Ceci Morales, Artur Dubrawski, John Galeotti, Howie Choset ICRA Workshop (3rd Workshop on Representing and Manipulating Deformable Objects), 2023 (Oral Presentation) Paper | Poster | Video A 3D deformation simulation framework where we reduce the sim2real gap by optimizing for material properties through maximizing IoU of the vessel area from the simulation and the real-world ultrasound images. |
|
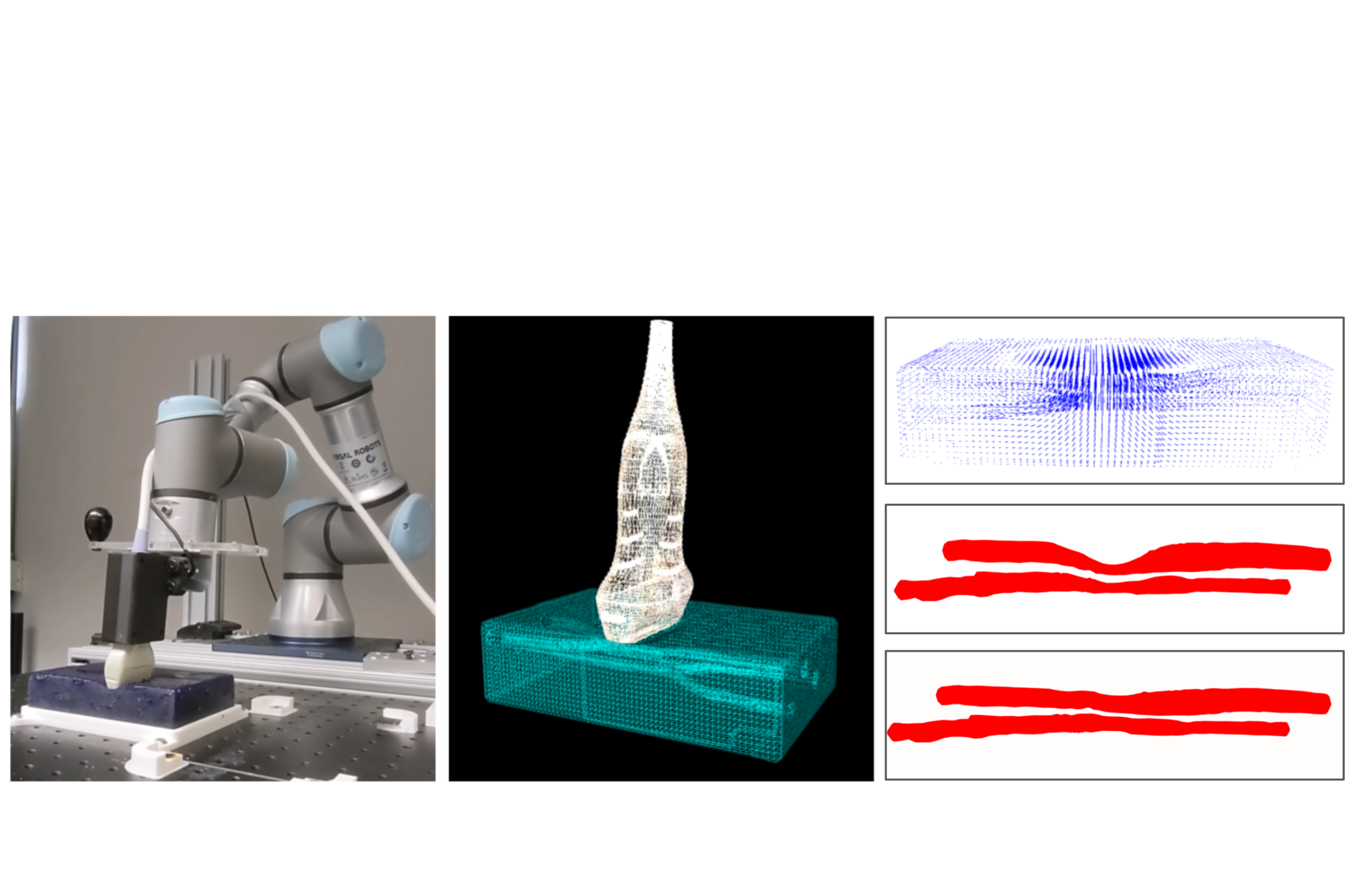
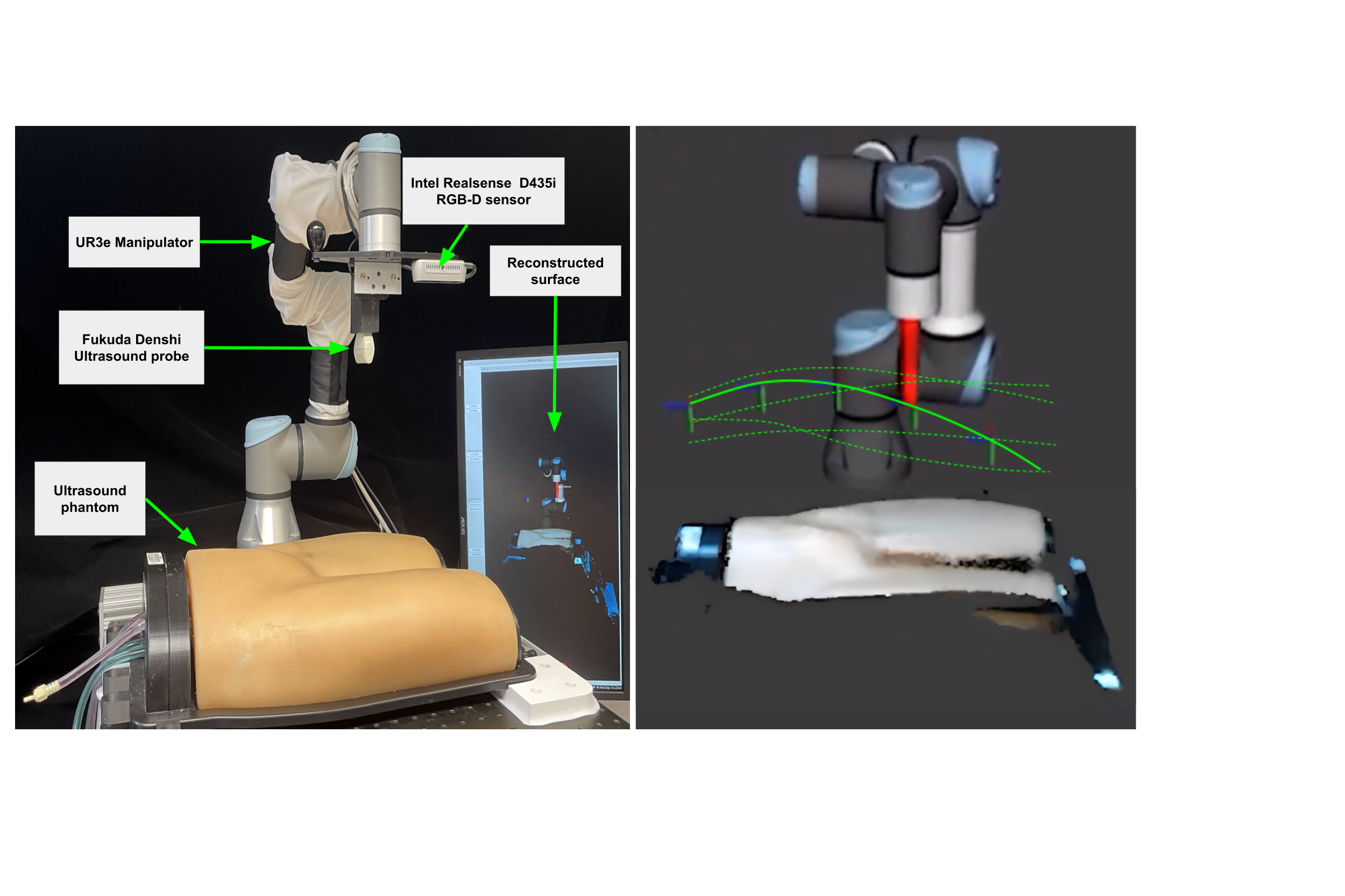
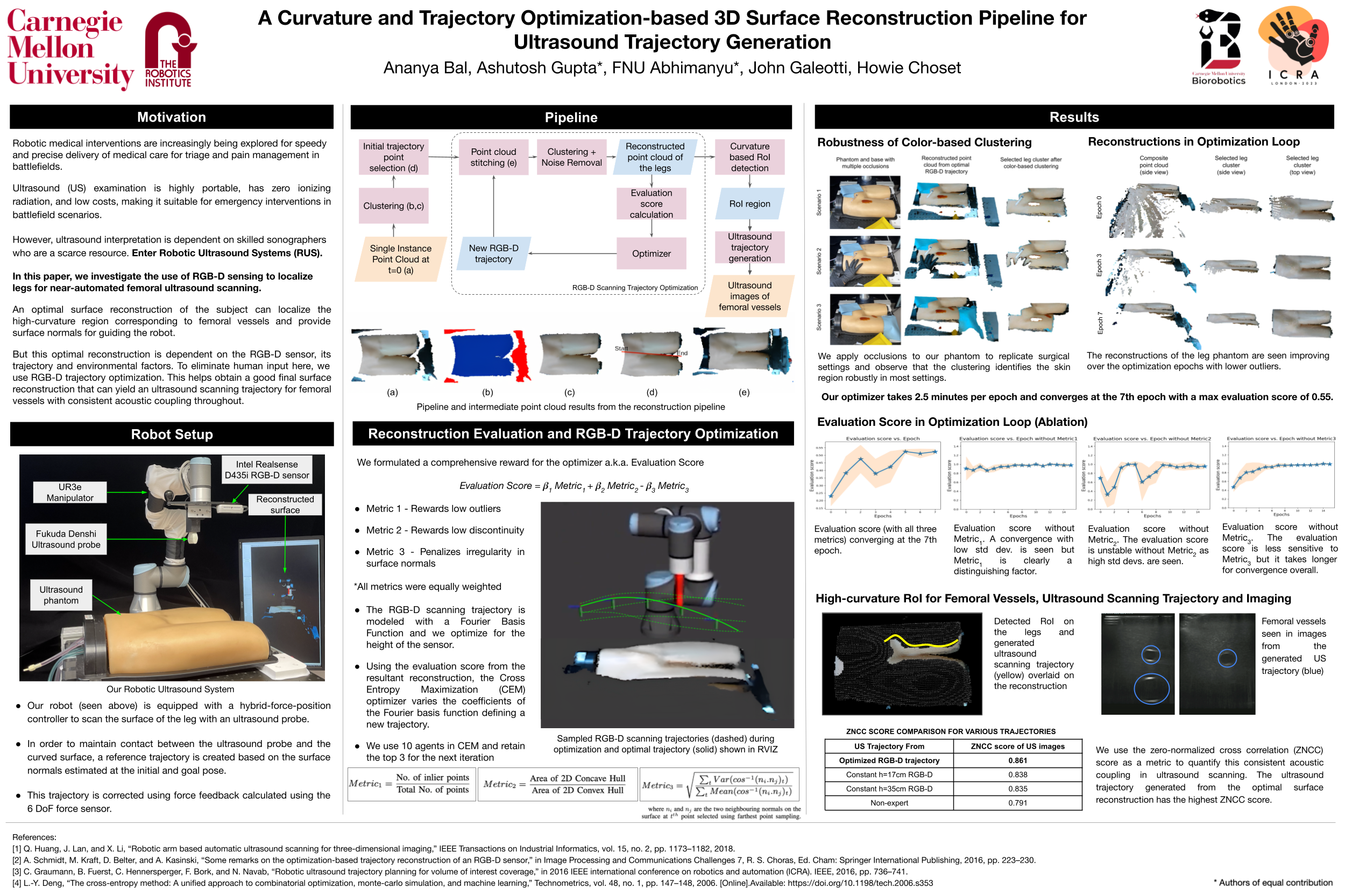
Robotic Ultrasound System
Ananya Bal, Ashutosh Gupta, FNU Abhimanyu, John Galeotti, Howie Choset ICRA, 2023 (Oral Presentation) Paper | Publication | Poster | Video Implemented a real-time 3D surface reconstruction pipeline to identify a high curvature region for autonomous ultrasound scanning. A novel and comprehensive 3D reconstruction evaluation score is proposed. Achieved 0.05 mm Chamfer accuracy vs CT scans on medical leg phantoms. |
|
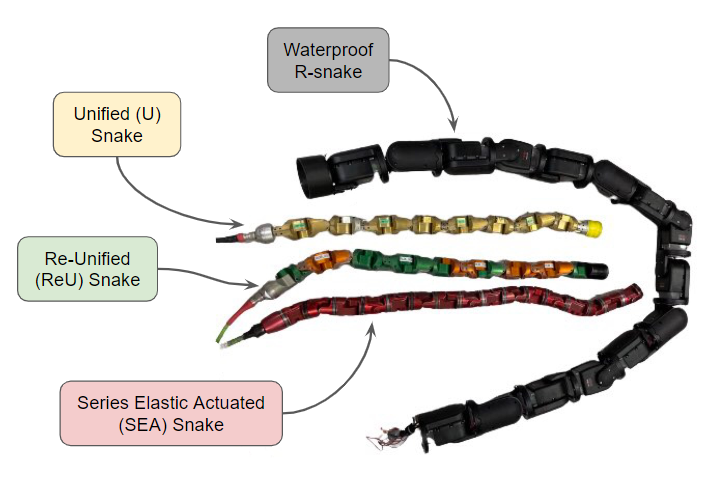
Articulated Modular Snake robots
Ashutosh Gupta, Khush Agrawal, Howie Choset Developed Unified a Python/ROS1 control codebase for three modular snake robot variants, enabling gaits such as sidewinding, slithering, rolling, and pole climbing. Demonstrated versatility through hardware experiments, including tree climbing by wrapping the robot in a helical configuration. |
|
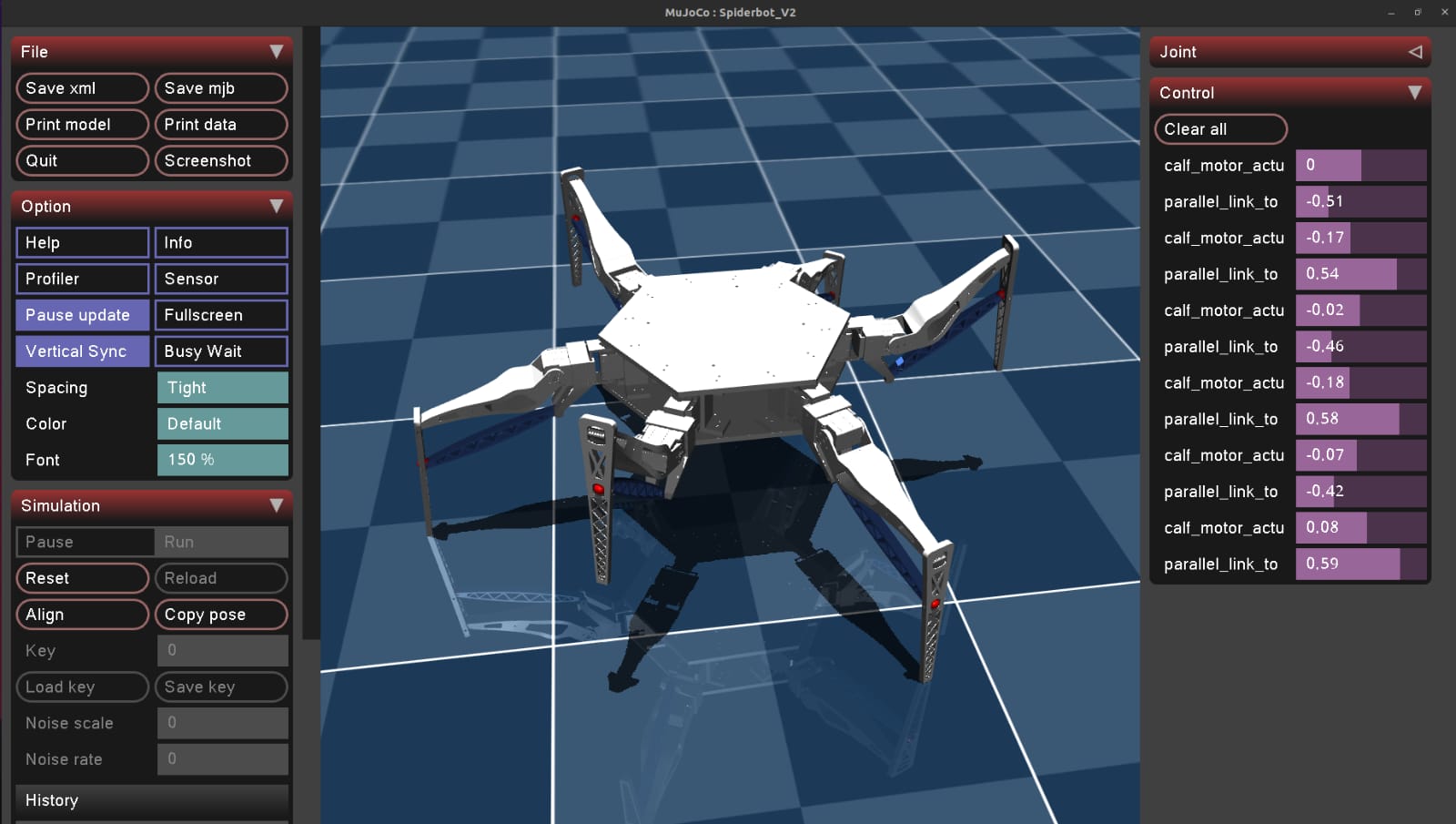
SpiderBot - Symmetric Hexapod
Ashutosh Gupta, Pranav Goyal, Laukik Nakhwa Code Initiated and led a student project to design and prototype an 18-DOF hexapod robot, exploring kinematics, dynamics, and CPG-based gait control. Developed MATLAB/Simulink and Coppelia simulations and built a hardware prototype with 3D-printed parts and custom electronics. |
{kind=link}
{kind=link}
{kind=link}
|
Last updated: October 2025 Feel free to steal this website's source code. Do not scrape the HTML from this page itself, as it includes analytics tags that you do not want on your own website — use the github code instead. Also, consider using Leonid Keselman's Jekyll fork of this page. |